PICK & PLACE - DÉVRACAGE - PALÉTISATION - VISION
PRECISION
VISION
PRÉHENSION
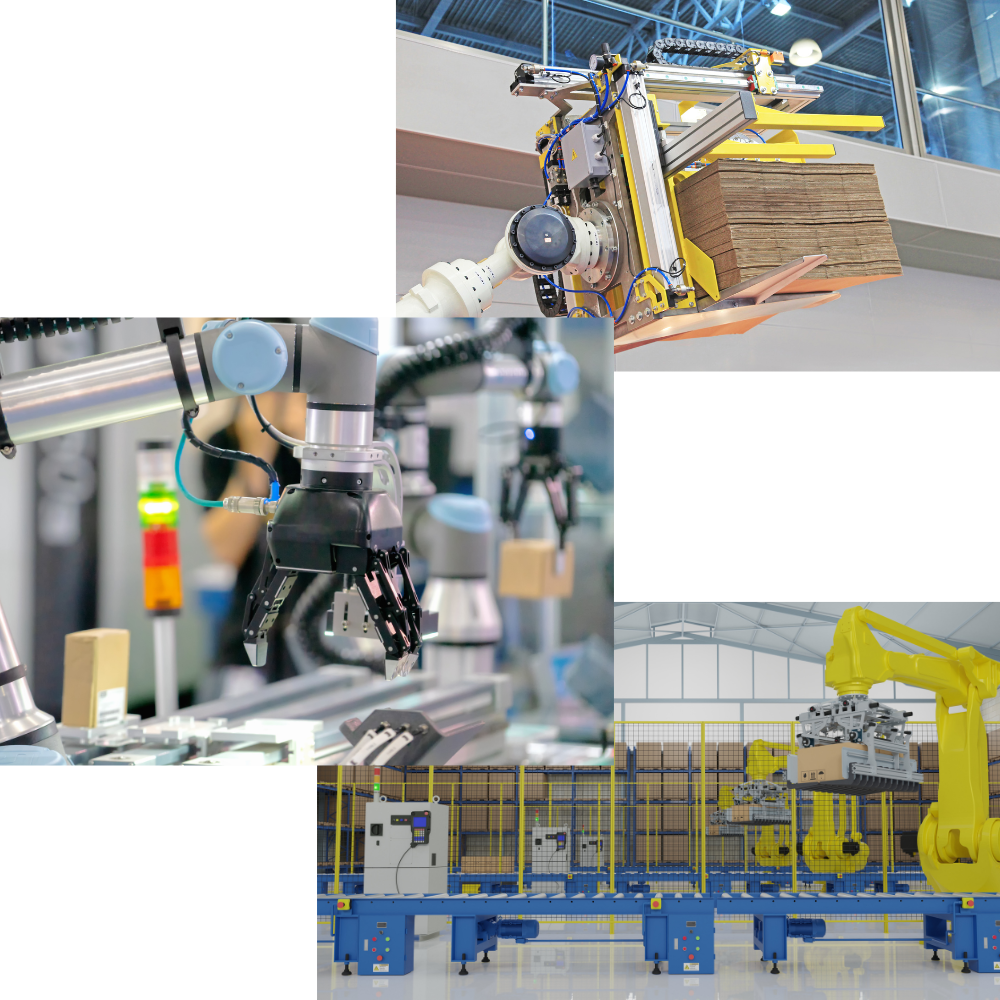
LA MANIPULATION ROBOTIQUE
Dans de nombreux secteurs industriels, des tâches répétitives engendrent des TMS (Troubles Musculo Squelettiques), notamment en raison du port de charges lourdes.
C’est pourquoi, il est essentiel d’optimiser vos opérations industrielles, en robotisant vos lignes de production.
Chez SybotX, nous nous engageons à étudier, concevoir et intégrer des solutions agiles qui répondent parfaitement à vos besoins.
Nous vous assurons ainsi d’une automatisation optimale de votre process industriel.
PRINCIPES DES SYSTÈMES DE MANIPULATION
PROGRAMMABLE ET AUTOMATISÉE
La manipulation d’éléments est le premier principe des systèmes de process standard en robotique industrielle.
Les robots de manipulation répondent à deux enjeux majeurs pour votre activité industrielle.
Sécurité : Protéger vos équipes de la pénibilité liée aux répétitions de mouvements ou aux ports de charges lourdes.
Rentabilité : Solution efficace, accomplissant des tâches rapides réalisées sur de longues périodes.
POLYVALENCE ET ADAPTABILITÉ
Grâce à leur conception modulaire et à leurs préhenseurs interchangeables, les robots industriels peuvent être rapidement reconfigurés pour effectuer diverses opérations sans nécessiter de modifications majeures.
Cette flexibilité offre aux entreprises un avantage concurrentiel, leur permettant de répondre efficacement aux fluctuations de la demande et d’optimiser l’utilisation de leurs ressources robotiques.
LES ROBOTS MANIPULATEURS
Le choix d’un robot manipulateur dépend étroitement de l’application visée.
On retrouve principalement :
- Robots Cartésiens : Idéaux pour le chargement/déchargement de machines, le collage et les opérations de mesure.
- Robots SCARA : Parfaits pour l’assemblage électronique, le pick-and-place et les tests.
- Robots Delta : Utilisés dans l’emballage, l’alimentation de machines et la manipulation de produits légers à haute vitesse.
- Robots articulés : Polyvalents, ils sont utilisés dans une multitude d’applications, de la soudure à la peinture en passant par l’inspection.
LES OPÉRATIONS DE MANIPULATION ROBOTISÉES
PICK AND PLACE
Le pick and place en robotique industrielle consiste à faire saisir des objets dans un emplacement donné, puis de les déplacer vers un autre emplacement de manière précise et efficace.
Équiper de divers capteurs, tels que la vision, la préhension, linéaires, l’opération de manipulation, réduisant ainsi les erreurs et les coûts associés à la main-d’œuvre humaine.
DEVRACAGE & ÉPINGLAGE
Le dévracage et l’épinglage en robotique industrielle consistent à séparer des éléments en vrac et les épingler, exemple des pièces ou des produits alimentaires, à partir de conteneurs ou de sacs.
Équipés de bras et de capteurs pour saisir et manipuler les produits, l’objectif du process est d’améliorer l’efficacité de la chaîne, minimiser les erreurs et optimiser la gestion des stocks.
PALETTISATION / DÉPALETTISATION
Automatiser les processus de chargement et de déchargement des produits permet de réduire la dépendance à la main-d’œuvre manuelle, d’optimiser l’efficacité et de minimiser les erreurs.
Grâce aux robots et les capteurs, les charges sont manipulées de manière précise et sécurisée, permettant d’améliorer la productivité et la fluidité des opérations logistiques.
VISION 2D ET 3D
Les processus de robotique, intégrant la vision 2D et/ou 3D, permettent aux robots de localiser, manipuler et contrôler précisément des objets.
En disposant d’informations spatiales détaillées grâce aux capteurs de vision, de préhension et de positionnement, les robots peuvent travailler de manière fiable et efficiente, améliorant ainsi les performances globales des opérations.
LES ROBOTS DÉDIÉS A LA MANIPULATION STANDARD
Il existe plusieurs marques de robots, dont les plus connues sont FANUC, ABB, YASKAWA, STAUBLI, KUKA, KAWASAKI…
SybotX, votre bureau d’ingénierie robotique spécialisé dans la pulvérisation et la dépose, collabore et travaille avec de nombreuses marques.





